レッスン 3 Raspberry Pi システムのインストールと構成
[方法1]で作成したSDカードでラズパイを起動しました。
Wifiには、すでに接続できています。
sudo raspi-config
Raspberry Pi SSH サービスの開始

[Interface Option]を選択

[SSH]を選択

[はい]を選択

SSH サーバーが、起動しました。
ラズパイの IPアドレスを調べる
ラズパイの Wifi アイコンにカーソルを当てると表示されます。
Windows をラズパイにsshで接続
Windows 11 のコマンドプロンプト画面からラズパイにsshで接続します。
ssh pi@192.168.11.13

接続確認がでたら[yes]を入力します。

[Enter]を押すと、パスワードを要求されるので[raspberry]と入力します。

[LXTerminal]モードになりました。
sudo git clone https://github.com/adeept/adeept_darkpaw.git

GitHub からロボットプログラムをダウンロード

ダウンロードしたファイルを確認[adeept_darkpaw]
sudo python3 adeept_darkpaw/setup.py

依存ライブラリをインストール

インストールが終了して、sshを切断

ラズパイを再起動したら、カメラのランプが点灯しました。
Windows 11のブラウザーからポート5000番でラズパイに接続
192.168.11.13:5000
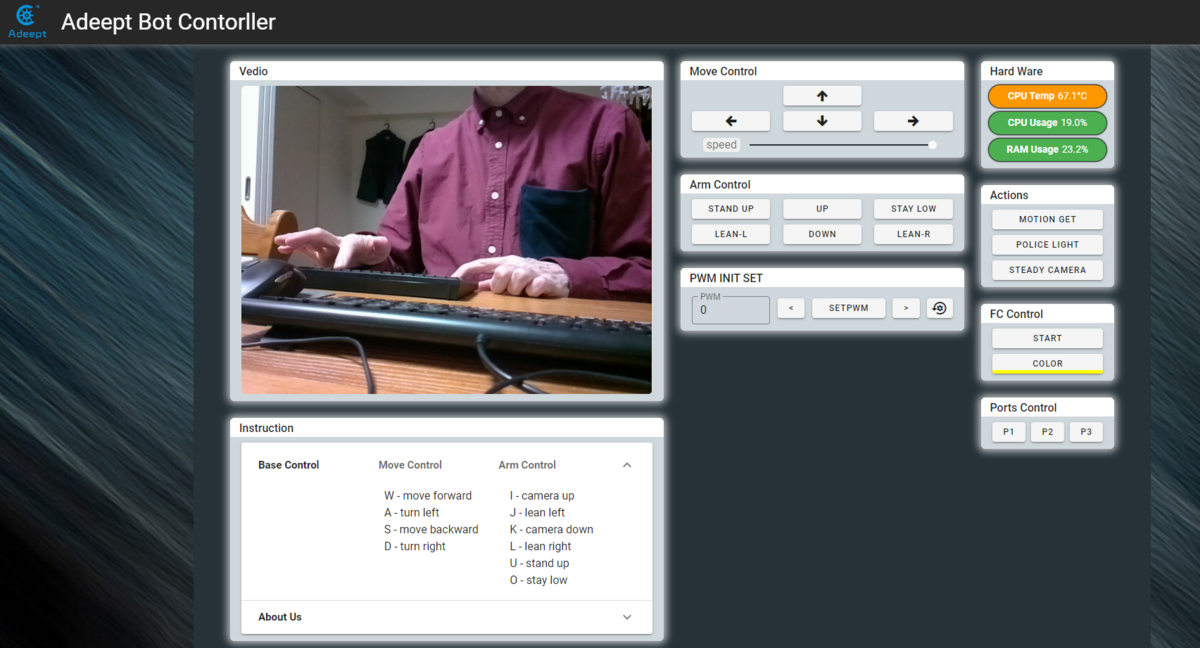
カメラが正常に動作していることを確認しました。