[概要]
RP2040-Core-A にCircuit Pythonのファームウェアをインストールする。

[必要なもの]
1 x RP2040-Core-A
1 x 設定用パソコン
[ピン配置]
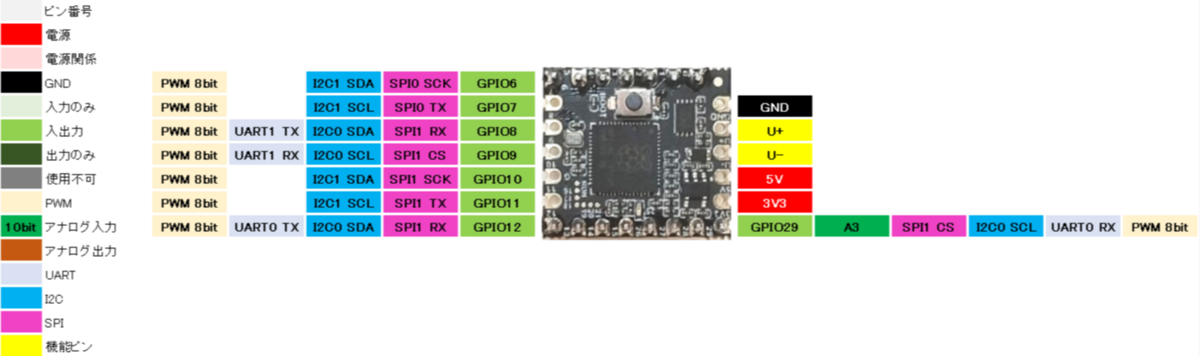

RP2040-Core-AはUSBコネクタがありません。
SBケーブルを電源、GND、書き込み用の端子に接続してCircuit Pythonのファームウェアを書き込みます。
[circuitpythonをセットアップ]
- RP2040-Core-AのBOOT SELボタンを押しながら、USBケーブルをパソコンに接続します。
- パソコンの画面では、RP2040-Core-A をストレージとして認識します。
- UF2ファイルを以下のサイトからダウンロードします。
circuit python UF2 Download - ダウンロードしたファイル[adafruit-circuitpython-raspberry_pi_pico-ja-x.x.x.uf2]をストレージ認識したRP2040-Core-Aにドラッグ&ドロップする。
以上の作業でcircuitpythonのセットアップは終了です。
[LED点灯]
ボードに組み込まれているLED赤を点灯します。
LED赤は、GPIO25番です。
import digitalio
from board import *
import time
port = GP25led = digitalio.DigitalInOut(port)
led.direction = digitalio.Direction.OUTPUT
while True:
led.value = True
time.sleep(1.0)
led.value = False
time.sleep(2.0)
[自動起動]
自動起動する場合は、ファイル名をcode.pyで保存します。
[Micropythonをセットアップ]
- RP2040-Core-AのBOOT SELボタンを押しながら、USBケーブルをパソコンに接続します。
- パソコンの画面では、RP2040-Core-A をストレージとして認識します。
- UF2ファイルを以下のサイトからダウンロードします。
Micro python UF2 Download - ダウンロードしたファイル[RPI_PICO-yyyymmdd-vx.xx.x.uf2]をストレージ認識したRP2040-Core-Aにドラッグ&ドロップする。
以上の作業でMicro pythonのセットアップは終了です。
[LED点灯]
ボードに組み込まれているLED赤を点灯します。
LED赤は、GPIO25番です。
import machine,utime
led = machine.Pin(25, machine.Pin.OUT)
while True:
led.value(1)
utime.sleep(1.0)
led.value(0)
utime.sleep(2.0)
[自動起動]
自動起動する場合は、ファイル名をmain.pyで保存します。